ROV Hercules

In Greco-Roman mythology, Hercules is a god famous for his incredible strength, stamina, and far-reaching adventures. Since it was first launched in 2003, remotely operated vehicle (ROV) Hercules has similarly explored the farthest reaches of our planet’s unknown oceanic environments with endurance and tenacity befitting a hero. With Hercules, OET has surveyed ancient shipwrecks, discovered hydrothermal vents, and helped to identify marine species new to science.
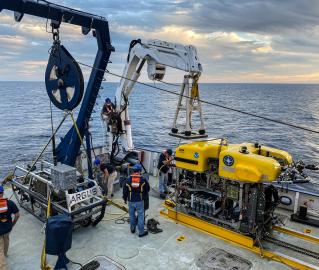
ROV Hercules is at the center of the Nautilus exploration program, working in tandem with ROV Argus or Atalanta to explore the geology, biology, archaeology, and chemistry of the ocean. Hercules is outfitted with special features that allow it to perform intricate tasks, including two manipulator arms, a variety of sensors and samplers, a high-definition video camera, several LED lights, and high-resolution mapping tools. The submersible receives power from the surface through a fiber-optic cable, which also transmits data and video, to allow pilots located in the shipboard control van to “fly” the ROV in any direction through the use of its six thrusters.
A pair of manipulator arms allows the Hercules pilot to remotely collect biological and geological samples with precise dexterity. Hercules can deliver up to 113 kilograms (250 pounds) of samples or tools to and from the seafloor, carried in specially designed collection boxes and acrylic jars. Other sensors located on Hercules measure pressure, depth, water temperature, oxygen concentration, and salinity to accommodate requests from scientists both onboard and onshore.
Hercules is equipped with multiple cameras, including a high-definition video camera that allows for real-time telepresence. Video from this main forward-facing camera is streamed up a fiber-optic cable through Atalanta and into the control van aboard Nautilus before being sent out to scientists, students, and the public watching across the world through our round-the-clock live streaming system.
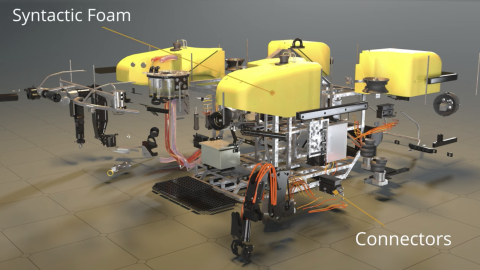
The upper portion of Hercules is encased in a bright yellow flotation package constructed of “syntactic foam,” a composite material made of tiny, hollow glass balls mixed into epoxy resin. This makes Hercules slightly buoyant so that it will float when on the surface but can be driven up or down by thrusters. The Volkswagen beetle-sized ROV is built to withstand pressures at a depth of 4,000 meters (13,100 feet) with more than 6,000 pound-force per square inch (psi) for up to three days. Hercules weighs more than a car and measures 1.9 meters (6.2 feet) wide by 2.2 meters (7.2 feet) tall. It is 3.9 meters (12.8 feet) long. When not exploring the depths, Hercules is housed in a 24 square meter (258 square foot) ROV hangar aboard the Nautilus.
Learn More: The Tools of Exploration
Science & Tech
Ocean exploration is a dynamic balance of understanding science and using the best in underwater technology.
Expeditions
Get a sneak peek of where we're headed next or revisit the discoveries of our past expeditions.
Classroom Resources
OET hosts a suite of free educational materials for use in classrooms, at home, or in the community.
ROV Hercules At-a-Glance
General
- 4,000 meters (13,123 feet)
- 30–45 meters (98.4–147.6 feet), 20 millimeters (0.79 inches) diameter, neutrally buoyant
- 3.9 meters long × 1.9 meters wide × 2.2 meters tall (12.8 feet long × 6.2 feet wide × 7.2 feet tall)
- ~ 2,500 kilograms (5,500 pound) mass in air
- Up to 113 kilograms (250 pounds)
- 0.77 meters/second (1.5 knots) forward, 0.25 meters/second (0.5 knots) lateral, 0.5 meters/second (1 knot) vertical (on site, within tether range)
- 1 meter/second (2 knots), no sampling, in layback mode
- 0.5 meters/second (1 knot), no sampling
- 0.25 meters/second (0.5 knots) on flat seafloor; < 0.13 meters/second (< 0.25 knots) over featured terrain
- Station Keep, X/Y step, Auto Depth, Auto Altitude, X/Y/Z step and hold velocity control
- 30 meters/minute (98.4 feet/minute), 15 meters/minute (49.2 feet/minute), 20–22 meters/minute avg.
- Six hydraulic thrusters powered by 15 kW (20 hp), 207 bar (3,000 psi) hydraulic system
- Fore/Aft & Vertical – Four 27.94 cm (11 inch) ducted thrusters, each providing 900 N (200 lbf) thrust
- Lateral – Two 22.86 cm (9 inch) ducted thrusters, each providing 450 N (100 lbf) thrust
Vehicle Sensors & Navigation
- NavEst integrated navigation system solution
- Primary Heading – IXSEA Octans III north-seeking fiber-optic gyrocompass (0.1° secant latitude accuracy with 0.01° resolution)
- Secondary Heading – TCM2 solid state fluxgate compass
- Paroscientific Digiquartz 8CB series
- Sea-Bird FastCAT 49
- Aanderaa 3830
- WHOI high-temperature probe (0°–450°C, 0.1°C resolution)
- RDI Workhorse Navigator Doppler Velocity Log 600 kHz, 0.7–90 meter range (2.3–295.3 feet)
- Kongsberg Mesotech 1071 series multifrequency scanning sonar. Tunable from 400kHz - 1000kHz. Range to 200m (656 ft) at 450kHz. Range resolution up to 3.75mm (0.15in)
- Tritech Super SeaKing V7 Scanning Sonar. 325 and 675kHz. Range 0.4 - 300m (1.3–984 feet). Range Resolution 0.015m (0.05 ft)
Imaging & Lighting
- One high-definition video channel on fiber optic, four standard definition video channels on coax, generally configured as:
- Insite Pacific, 6,000 msw rated, Zeus Plus with 10× zoom lens, Ikegami HDL-45A with zoom/pan/tilt/extend –1080i SMPTE 292M output format
- Insite Pacific, 6,000 msw rated, Titan Rotate-Tilt standard definition camera (bubble camera) 480 line NTSC format
- Three Insite Pacific NOVA utility cameras, mounted to view the starboard sample box, port rail, and aft region 480 line NTSC format
- One Insite Pacific Aurora utility camera to view the eight-jar suction sampler, NTSC format
- One Deep Sea Power & Light Wide-i-SeaCam to view starboard side sample box, NTSC format
- Up to three Z-Cam E2-F6 Pro cinema cameras with arrangement to record stereoscopically
- 6000 msw rated, 24-megapixel full-frame sensor
- Fifteen Deep Sea Power & Light Sphere LED lamps, 6,000 lumens, mounting configurable
- Two green Deep Sea Power & Light Micro Sea-Lasers, mounted 10 cm (3.94 inches) apart, HD camera only
- Stills Imaging Camera One low-light sensitive 24 megapixel 6k cinematic camera with a 16-35 millimeter lens controlled via ethernet. Fixed mounted
- Available for nonstandard mapping products
- Typical configuration is downward looking; forward-looking configuration possible
- Two stereo Prosilica GT 2750 still cameras, one black & white, one color; 2750x2200 pixels; 29° × 39° field of view; 2–4 meter (6.5–13 feet) range; 200 wattsec strobe lighting at 1 image every 3 seconds
- Structured light laser system with a dedicated Prosilica GC 1380 still camera; runs concurrently with stereo imaging; 532 nanometer 100 mw Coherent laser; 45° line generating head
- System also supports Kongsberg M3 sonar
Manipulators and Sampling
- Kraft Predator: Hydraulic, seven function spatially correspondent, force feedback, 200 lb lift
- Schilling Orion: Hydraulic, seven function, 150 lb lift
- Suction sampling system, eight 3-liter discrete samples -or-
- Venturi dredge excavation system
- mission configurable
- Up to eight 6.35 centimeter (2.5 inches) inner diameter, 28 centimeters (11 inches) long push cores
- Up to six 5-liter Niskin bottles, manually triggered
- Custom tools and sensors can be integrated
- Forward sample tray (inboard): 45 cm × 33 cm × 25 cm (17.7 inches × 13 inches × 9.8 inches)
- Forward sample tray (outboard): 68 cm × 35 cm × 30 cm (26.8 inches × 13.8 inches × 11.8 inches)
- Starboard sample drawer: 65 cm × 50 cm × 30 cm (25.5 inches × 19.7 inches × 11.8 inches)
- Payload: Up to 113 kilograms (250 pounds) depending on sensor package
- Custom configuration of boxes, crates, and containers
Scientific Instrument Support
- 110 V, 60 Hz AC
- 24 VDC
- 12 VDC
- RS-232: 115 Kbauds
- RS-485/422: 2.5 Mbauds
- Ethernet: 10/100/1,000 mbps links available
- TTL: one TTL link
- Proportional and solenoid hydraulic functions
- 1,150 psi at 5 GPM
- 1,850 psi at 5 GPM
- 3,000 psi at 5 GPM (advance notice needed)
- Advance notice is required for custom solutions to engineering integration of user-provided sensors and equipment.
- in situ mass and laser spectrometers
- Fluorometer, pH sensor, eH sensor
- Kongsberg M3 multibeam sonar
- Norbit wideband multibeam sonar - forward or downward facing
- 18 MP Ethernet-connected digital still camera
- Low-light camera (Canon ME20F-SH HD, 1080p at up to 4 million ISO, 24mm f1.4 prime lens)
- Modular soft grippers powered by an independent seawater-based hydraulic drive system
Example Technological Collaborations
- Applied Marine Sciences | PCB pump
- Coda Octopus Group | Echoscope sonar
- Impossible Sensing & SETI Institute | Laser Divebot
- Oregon State University | Sexton still camera
- Pacific Marine Environmental Lab | Miniature Autonomous Plume Recorders (MAPRs)
- University of Rhode Island | Laser mapping system, Norbit multibeam sonar
- University of Texas Rio Grande Valley | Suspended particulate rosette (SUPR)
- Woods Hole Oceanographic Institution | MISO GoPro Camera & Housing, Isobaric Gas Tight (IGT)
The Widefield Camera Array was developed by Ocean Exploration Trust and the Sexton Corporation with funding from the Office of Naval Research to collect high-resolution imagery with the capability to develop 3-dimensional photogrammetric models, hemispherical video for immersive imagery, or and IMAX-quality cinematographic productions.
The system consists of up to three genlocked E2-F6 cinema cameras that record synchronous images at extremely wide fields of view. Two cameras in the array operate in parallel to record stereoscopic images at a 180-degree angle of view, with the third camera capturing a 60-107 degree image that is optimized for the light level, terrain, and altitude of a given survey. Each camera features a 24-megapixel full-frame sensor capable of imaging at 60 frames per second at 6064×2560 pixels per frame.
Widefield Camera Array At-a-Glance
- Deployment: m ounted on ROV Hercules and ROV Little Hercules
- Depth capability 6,000 meters
- Size 30 x 16 x 10.5 inches
- Weight 160 pounds in air
- Cameras Three E2-F6 Pro cinema cameras
- 60 - 340 degree angle of view
- 24 megapixel full-frame sensors
- 60 frames per second at 6064×2560 pixels