Exploring the Deep Sea History of Seafloor Mapping
A map is a basic tool for any explorer, and researchers aboard E/V Nautilus are no different!
Systematic mapping of the seafloor began more than a century ago and remains an essential component of ocean exploration. Today, our science and mapping teams use state-of-the-art technology in order to inform future dive targets so that we can safely operate ROVs in unexplored regions. We know that mapping is a fundamental part of understanding oceanic systems, from their circulation and tides to forecasting tsunamis and environmental change, but where did it all begin?
Nearly two-thirds of our planet is covered by ocean and yet we’ve mapped less than one-fifth of the seabed. Ocean Exploration Trust's Science and Mapping Coordinator Lindsay Gee shares a brief history of oceanic mapping and how we got to where we are today. Gee says that his mapping work has given him a “close historical connection” with some of the world’s earliest explorers.
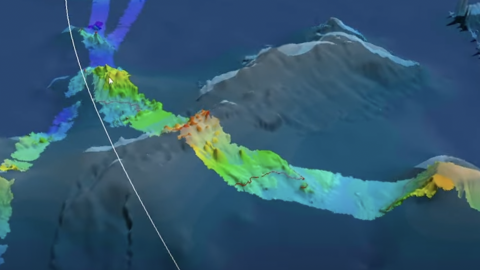
The Nautilus team is able to map the seabed using a sub-bottom echosounder mounted inside the hull of the ship. The echosounder operates at low frequencies that allow sound to penetrate the layers of sediment, creating a cross-section of the seafloor and revealing the structure of the seabed.
As it stands, less than 20 percent of the world’s oceans has been mapped at high-resolution – we have better maps of Mars then we do of the seafloor! The Nautilus team plans transit routes to cover unmapped seamounts and areas of the ocean that have never been explored in order to contribute data to Seabed 2030, an international collaborative project that aims to bring all bathymetric data together to produce the definitive map of the world ocean floor.
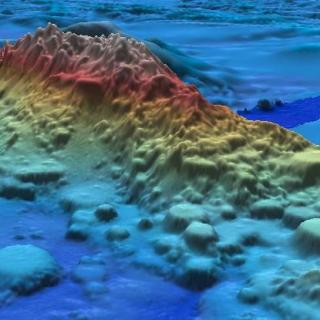
Pacific Seamounts
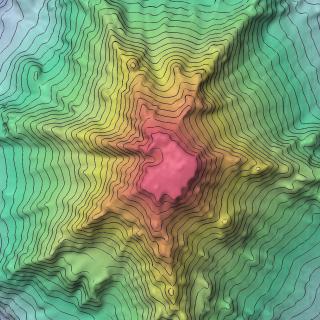
This mapping expedition will focus on unmapped areas of the Pacific between San Francisco and Honolulu as E/V Nautilus operations move out into the Pacific Ocean between the Hawaiian Islands and Samoa. The transit route will utilize the multibeam echosounder and sub-bottom profiler to fill in gaps in seabed mapping coverage across the Pacific, plus targeted mapping of a number of seamounts in the vicinity of the Murray Fracture zone.
Pacific Seamounts
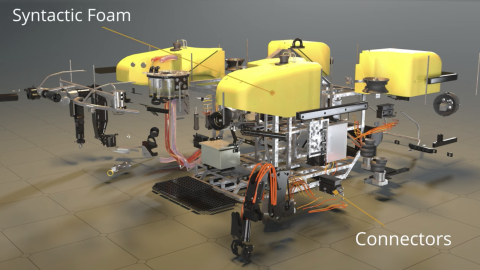
The expedition will focus on mapping from Honolulu to San Francisco, as the E/V Nautilus’ operations move back east to the US West Coast, in addition to the first deep water test of a new mobile ROV system. The mapping route has been planned to utilize the multibeam echosounder and sub-bottom profiler to fill in gaps in seabed mapping coverage across the Pacific.