Mesobot is Back for the 2023 Tech Collaboration Cruise

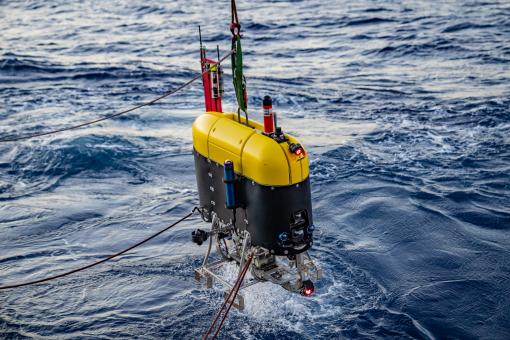
Over the last three years, OET has been working with partners from Ocean Exploration Cooperative Institute (OECI) to integrate emerging exploration technologies to enhance ocean exploration. Woods Hole Oceanographic Institution’s engineer and NA155 Operations Leader Eric Hayden updated us on what's new with (HROV) Mesobot this year.
“Mesobot is back on E/V Nautilus with some brand-new upgrades. We are using new BlueRobotics T500 thrusters, making our propulsion system more robust and easily replaceable. We have a new camera setup, which has worked great so far. We replaced our main ‘science cam’ with a Z-cam and added a wider-angle MISO cam provided by our colleague Dan Fornari at WHOI. So, we are now using two main forward-facing cameras capturing events in two different ways. Even early on in the cruise, we already got great footage!
“Some new tools have been made for better multi-vehicle operations as well, especially between Mesobot and USV DriX. First, we have a new AIS beacon called the Xeos Petrel. This tool allows DriX to easily locate Mesobot on the surface. It came in handy a few nights ago when DriX and Mesobot were working together while the ship was miles away. Mesobot surfaced prematurely, and DriX was able to locate Mesobot on the surface and stay in proximity until Nautilus could return to the site for recovery.
“We have also set up a WiFi connection between Mesobot and DriX, which weplan to test during the expedition. Hopefully, this will allow us to pull information off of Mesobot and potentially control it through DriX while it is on the surface. This means that unlike least year, when Mesobot’s operations ended after surfacing, we can continue useful interactions between vehicles at the ocean’s surface.
“So far during the NA155 expedition, our multi-vehicle operations between Mesobot and DriX have been superb. Last year’s breakthrough Verified Directed Sampling (VDS) process has become standard procedure. The process includes using DriX’s EK80 sonar to locate both Mesobot and the biological layers we want to study, allowing us to direct Mesobot to exactly the right spot for sampling.

“Instead of giving Mesobot its own complex mission, we just tell the vehicle to dive to a depth and wait to hear from DriX. We then command Mesobot through DriX, with a full view of the acoustic layers we want to explore. We have been using this process to precisely direct our sampling and video surveys while Nautilus is many miles away from the exploration site.
“There is much more we are currently developing: more complex missions to be sent from DriX to Mesobot, potentially some decision-making by DriX, and more real-time plotting of data (CTD, radiometer, fluorometer) that Mesobot sends up to the surface acoustically. We can’t wait to see what else we accomplish!”

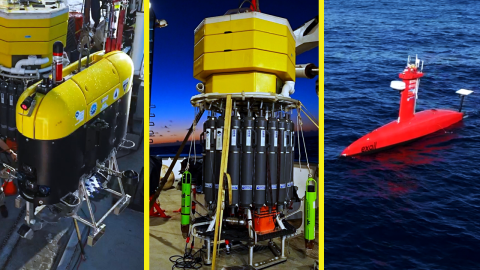
OECI Multi-vehicle Exploration
Over the last three years OET has been working with partners from Ocean Exploration Cooperative Institute (OECI) to integrate emerging exploration technologies to enhance ocean exploration.