Our Ship's Cat: Meet AUV 'Popoki'

Contributed by Science Communication Fellows: Linda Fergusson-Kolmes, David Downing and Megan Chen
Mariners have a long tradition of having a ship’s cat. This season, the EV Nautilus has a very special ‘cat’ on board. She is the SeaBED AUV (autonomous underwater vehicle) named ‘Popoki’ (Hawai’ian for cat). Led by senior scientist, Elizabeth Clarke, a team from NOAA Northwest Fisheries Science Center (NWFSC), has brought her on board while the ship is exploring Olympic Coast National Marine Sanctuary. Co-owned with NOAA Pacific Islands Fisheries Science Center (PIFSC), ‘Popoki’ is a sleek 227 kg (500 lb) SeaBED AUV originally developed by Hanumant Singh (Northeastern University, Electrical Computer Engineering).
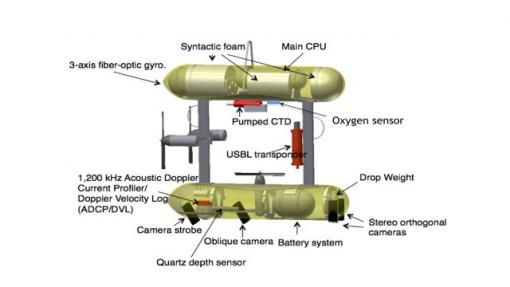
Her job is to ‘catch fish’, and she does that with cameras. She is special because her twin-hulled design lets her move slowly (0.5 knots) over an area while maintaining a constant altitude over uneven terrain. Diving as deep as 2,000 m, her range for hovering over the bottom is 1-20 m but the best photos are taken at 2-3 m. She can then be preprogrammed to follow a particular track, take 3 photos every 8 seconds and then return to the ship. The two orthogonal cameras in the nose-cone allow for stereo photos that can be used to measure organisms in the photos. The third oblique camera attempts to provide a profile of the fish, important for identification.
Human expertise is still key and on this watch, fisheries biologist, Erica Fruh (NWFSC), is the go-to-person for fish identification. The technology is also very flexible and post-doc Abi Powell, with a background in sponge ecology, has recently joined the team to provide statistical support.
A computer software tool, 1,2 RED, BLUE, helps the scientists make those counts. But if you thought 1,2 RED, BLUE was a clever name for software, even better is HAIRBALL, a program to make the AUV back-up when it hits a vertical feature that she cannot go over. ‘Popoki’ is also fitted with sensors that measure: depth, temp, conductivity, and oxygen concentrations. Being able to send a camera into the deep ocean on an untethered vehicle provides lots of new possibilities. ‘Popoki’ comes with a multi-disciplinary team of 4-6 scientists and technicians. Each with their own expertise and perspective. Erica Fruh, the self-described ‘biologist in with a bunch of computer and engineering nerds’ describes the synergy and cohesion of the team, ‘It's a neat group because we all have a different role. We’ve all come together and recognized each other’s strengths and let them take over that section. Everyone does their job and things go well.’

They may bring different skills to the table but they share the excitement of what this technology means for studying life in the ocean. Jeff Anderson (Nature photographer and NOAA NWFSC contractor) captured this sentiment eloquently when he said, ‘[AUVs provide an opportunity for] continual expansion of knowledge…we are so close to the ocean that we can touch it but we know so little’.
The AUV is a new, potentially cost-effective way to get high quality information about community structure to fill in data gaps. Traditional methods for assessing fish stocks, e.g. trawls or sonar, either can damage habitat or are not good assessing abundance of species that like to hide deep in rocky habitats. When asked what was the most exciting part of his work with ‘Popoki’, Jeremy Taylor, (NOAA technician from Joint Institute for Marine and Atomospheric Research at University of Hawaii), says ‘for me personally, it is working with this technology. I am amazed that this works. …I am fascinated every single time we do it’.

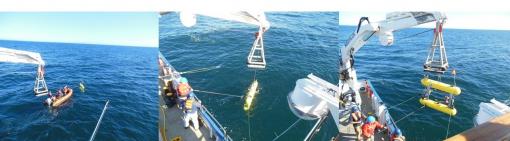
Communicating with cats is not a trivial matter. ‘Popoki’ has an acoustic modem that allows a message from the AUV to be sent to the team monitoring the dive from the ship, every 30 sec, with information about how many photos have been taken, where she is relative to the bottom and an estimate of remaining battery life. This is more like a ‘text’ or a ‘tweet’. If the team identifies a risk this system can be used to abort the mission and have her return to the surface. She can also self-abort if, for example, she senses that her battery life is too low or the maximum programmed depth has been exceeded. ‘Popoki’ is also equipped with a 1200 kHz acoustic doppler current profiler/doppler velocity log (ADCP/DVL). This provides information to the AUV’s computers about how high she is above the bottom of the ocean. The ultra-short baseline (USBL) transponder on the AUV and the receiver on the bottom of the ship allow determination of the position of the vehicle under the sea. Having the AUV return to download her precious cargo of photographs and other sensor data is critical, so when the ‘Popoki’ returns to the surface after a mission there is a radio signal sent to aid in recovery. In the event of a mishap, there are also back-up systems in place, such as a strobe light and an emergency dissolvable link that releases a weight after a given period -of-time in the water. When the link dissolves and the weights are released the vehicle is more buoyant and will float to the surface to be recovered. There can be some tense moments on deck if the AUV does not appear as expected at the end of a mission. But so far, the ‘cat has come back’ and the AUV ‘Popoki’ has successfully helped expand our understanding of creatures of the deep sea.

Quinault Canyon & Olympic Coast National Marine Sanctuary
Returning to the Pacific Northwest, Nautilus will launch an expedition with dual objectives in Olympic Coast National Marine Sanctuary, covering 3,189 mi2 of coastal and offshore waters along one of the least developed coastlines of the continental US.