HROV Nereid Under Ice

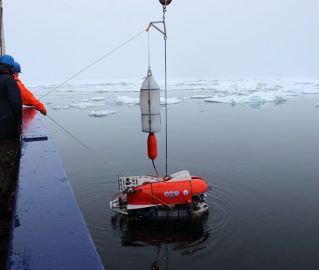
The hybrid remotely-operated vehicle (HROV) Nereid Under-Ice (NUI) was originally developed by engineers at Woods Hole Oceanographic Institution (WHOI) to explore ice shelves and floating sea ice far from its support ship and to operate in multiple modes, from a remotely-operated vehicle tethered to a research vessel and as a fully autonomous vehicle.
While NUI was developed to operate under Arctic ice conditions, its novel design and hybrid technology allows it to autonomously operate in difficult-to-reach places. Traditional ROVs with heavy armored tethers are limited in range and ability to get close to changing environmental conditions like sea ice, but NUI is able to travel laterally underwater with a lightweight tether up to 40 kilometers (25 miles), or be set up to operate fully autonomously.
Science & Tech
Ocean exploration is a dynamic balance of understanding science and using the best in underwater technology.
Expeditions
Get a sneak peek of where we're headed next or revisit the discoveries of our past expeditions.
Classroom Resources
OET hosts a suite of free educational materials for use in classrooms, at home, or in the community.
NUI At-A-Glance
General
- 5,000 Meters
- Air weight ot 1,800 to 2,000 kilograms depending on configuration
-
- 40 km @ 1 m/sec plus 20 km reserve (preliminary).
- Maximum speed in excess of 1.3 m/s.
- Closed-loop control of heading, depth, ice-relative and geo-referenced position (within 150 m of ice and seafloor, respectively)
- 18 kWhr lithium-ion
- On board precision atomic clock synchronized to GPS, 1 ppb drift rate/year.
Navigation
- IXSea Phins INS/north-seeking gyro-compass; back-up magnetic compasses (3)
- Paroscientific Nano-Resolution pressure sensor; SBE 49 FastCAT back-up
- up/down 300 kHz ADCP/DVLs; Blueview P900 imaging sonar for obstacle avoidance, One-way travel-time acoustic navigational aiding at 10 Hz, 3.5 kHz.
Communication
- Fiber-optic communications-only Gb Ethernet, 20 km
- LF (3.5 kHz) 20-300 bps for ship to vehicle (20 km range)
- HF (10 kHz) 300 bs, ship-to-vehicle (1-5 km range), vehicle to sensor; vehicle to vehicle
Imaging
- Imagenex DeltaT multibeam sonar (summer 2016)
- 200 kHz, 100 m maximum range
- Real-time color HD-SDI video on internal pan/tilt/zoom (Kongsberg OE12-522)
- LED lighting (8 DSPL Sphere, dimmable), 3 channels SD, encoded on board
- 1 MP up-looking still camera
Manipulation
- Kraft Telerobotics 7-function manipulator arm and custom high-efficiency HPU
Permanent Sensors
- Seabird FastCAT-49 pumped CTD
- WetLabs FLNTURTD Chl/backscatter fluorometer
- Native support for 10 auxiliary sensors