Testing Emerging Technologies With the Ocean Exploration Cooperative Institute

As we advance our capabilities to explore and understand the ocean through development of cutting-edge tools, technical testing is a key part of the process. This expedition aboard E/V Nautilus will support the testing of novel or emerging capabilities with two different autonomous underwater vehicles from Woods Hole Oceanographic Institution (WHOI). Funded by NOAA Ocean Exploration through the Ocean Exploration Cooperative Institute (OECI), these technology demonstrations support the OECI’s objective to increase the use and effectiveness of autonomous vehicles in ocean exploration, particularly in the U.S. Exclusive Economic Zone (EEZ). Beyond having numerous autonomous vehicles in the water at the same time, one of the OECI’s goals is to build towards autonomous vehicles sharing information, allowing each vehicle to be more effective and to provide increased situational awareness to the vehicle operators aboard or ashore.
This expedition features technical testing with two WHOI autonomous vehicles that have been designed for unique underwater environments. The hybrid remotely-operated vehicle (HROV) Nereid Under Ice (NUI) was originally developed by engineers at WHOI to explore ice shelves and floating sea ice far from its support ship and to operate in multiple modes, from a remotely-operated vehicle tethered to a research vessel and as a fully autonomous vehicle. Designed for an entirely different environment, the HROV Mesobot was developed by WHOI to visually survey and sample the ocean twilight zone, or mesopelagic zone, without disrupting the environment in which it operates. Mesobot has an extended battery life allowing it to observe delicate animals for as long as 48 hours in this critically understudied habitat.
The expedition will take place in two areas of interest to the deep-sea science community off the coast of Southern California, seep sites in the Santa Monica Basin and the submerged shoreline surrounding Osborn Bank, in the traditional and modern lands and waters of the Tongva, Kizh, and Chumash peoples. These sites were selected for their compatibility with the goals of the cruise but also because Nautilus has conducted recent expeditions in this area and has baseline data that will allow a detailed comparison between old and new data sets.

Pushing the Boundaries of Telepresence With the Nereid Under Ice Vehicle
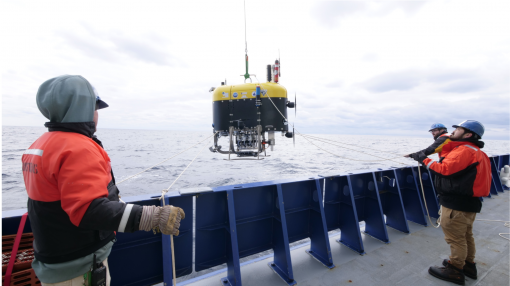
HROV NUI was developed by engineers at the Woods Hole Oceanographic Institution (WHOI) as a vehicle originally intended to explore far under ice shelves. The importance of this expedition lies in testing the ability of NUI to operate in different modes, from fully autonomous (mapping on a preset mission), to semi-autonomous (receiving a new mapping mission via optical modem), to fully controlled via an optical modem on ROV Argus to collect push cores or other samples. This proof-of-concept operations test will lead to new methodologies or “concepts of operations” for underwater exploration in the future.
A key objective of this mission is to establish the capability for E/V Nautilus to deploy the NUI vehicle as an autonomous system capable of navigation, acoustic mapping, and visual surveys as well as its ability to operate as a hybrid system. One such concept will be to equip ROV Argus with an optical modem to serve as a “wireless hotspot” that we can operate near where NUI is exploring to provide real-time video and to provide the ability to remotely control NUI’s manipulators. Dynamically converting NUI from an autonomous mapping system to a vehicle with video and sampling capabilities directly controlled from pilots aboard Nautilus — and one day ashore — will eventually make deep-sea exploration even more dynamic and accessible.
A second part of this mission is to practice “tele-engineering,” essentially moving some of the tasks associated with the operations of the vehicle ashore. E/V Nautilus has long been a pioneer in demonstrating the capabilities of telepresence to provide access to researchers and viewers onshore. In that same way, WHOI engineers ashore will undertake some operational tasks including pre-diving checks on NUI using augmented reality.
The first proposed dive area is the Santa Monica Basin seep site that E/V Nautilus routinely uses as a sonar testing target to determine that the water column backscatter capabilities of the EM302 echosounder are functioning. The second target is Osborn Bank, a more complex terrain that our team will use to locate and image submerged caves amongst ancient shorelines down to 80 meters.
Advancing Technologies In the Twilight Zone
The Mesobot is a midwater science and exploration hybrid remotely-operated vehicle (HROV) that carries sensors, cameras, acoustic survey technologies, and novel environmental DNA (eDNA) sampling technologies. Exploratory vessels like Nautilus focus largely on the seafloor, but researchers want to extend that level of exploration into the mesopelagic zone, or midwater, to include traditional water column measurements, acoustic mapping, light field measurement, and video surveys.
Mesobot was designed by engineers at WHOI to deploy for longer than a full day to follow animals as they undertake vertical migrations at dawn and dusk from the deep ocean towards the surface. Just as benthic organisms are influenced by the terrain of the seafloor, organisms that live in the midwater — also known as the “twilight zone'' — are influenced by light. A radiometer onboard Mesobot will determine the lightfields of the various oceanic zones that play a vital role in the lives of the animals that call this region home, enabling it to control its depth according to the amount of light reaching the depths (much as a mesopelagic fish might) or allowing scientists to correlate its sensor readings and samples with light levels over the course of the daylight cycle.
Mesobot will also carry a filter sampler, enabling it to capture geochemical samples, plankton, or microbes for further study, including eDNA analysis. At any given point, hundreds of liters of ocean water can be pumped through these novel eDNA filters for future DNA extraction and sequencing. These new technologies enable scientists to characterize in situ behavior of individual species over extended periods for the first time, and can be used to assess how the composition of the mesopelagic animal community changes over time.
This expedition is supported by NOAA Ocean Exploration through the NOAA Ocean Exploration Cooperative Institute, a consortium of Ocean Exploration Trust, University of Rhode Island, Woods Hole Oceanographic Institution, University of New Hampshire, and University of Southern Mississippi that combines technological and scientific resources and expertise to accelerate and enhance future exploration of the estimated 3 billion acres of submerged US territory. Learn more about the OECI.

OECI Technology Demonstration: Nereid Under Ice (NUI) Vehicle + Mesobot
This expedition aboard E/V Nautilus will support the testing of novel or emerging capabilities with two different autonomous underwater vehicles from Woods Hole Oceanographic Institution (WHOI).